喜欢2次
上期内容我们介绍了定时器的PWM输出功能,本期内容来介绍一下定时器的正交译码器功能(编码器接口)。正交译码器是和正交编码器外设配合使用的,可对编码器输入的脉冲进行计数进而实现速度测量,本期内容我们通过一个使用旋转编码器的计数小实验,来初步了解它的应用方法。
系统环境
Windows 10-64bit
软件平台
NucleiStudio IDE 202102版
或 PlatformIO IDE
硬件需求
RV-STAR开发板
旋转编码器
正交编码器
上图中,A和B分别连接到两个传感器单元上,黑白相间的圆环称之为「栅格」。传感器单元和栅格的实现方式有很多种,包括「反射式传感器+反光率不同的栅格」「对射式传感器+镂空光栅」「霍尔传感器+磁极圆环」「触点+导轨」等。
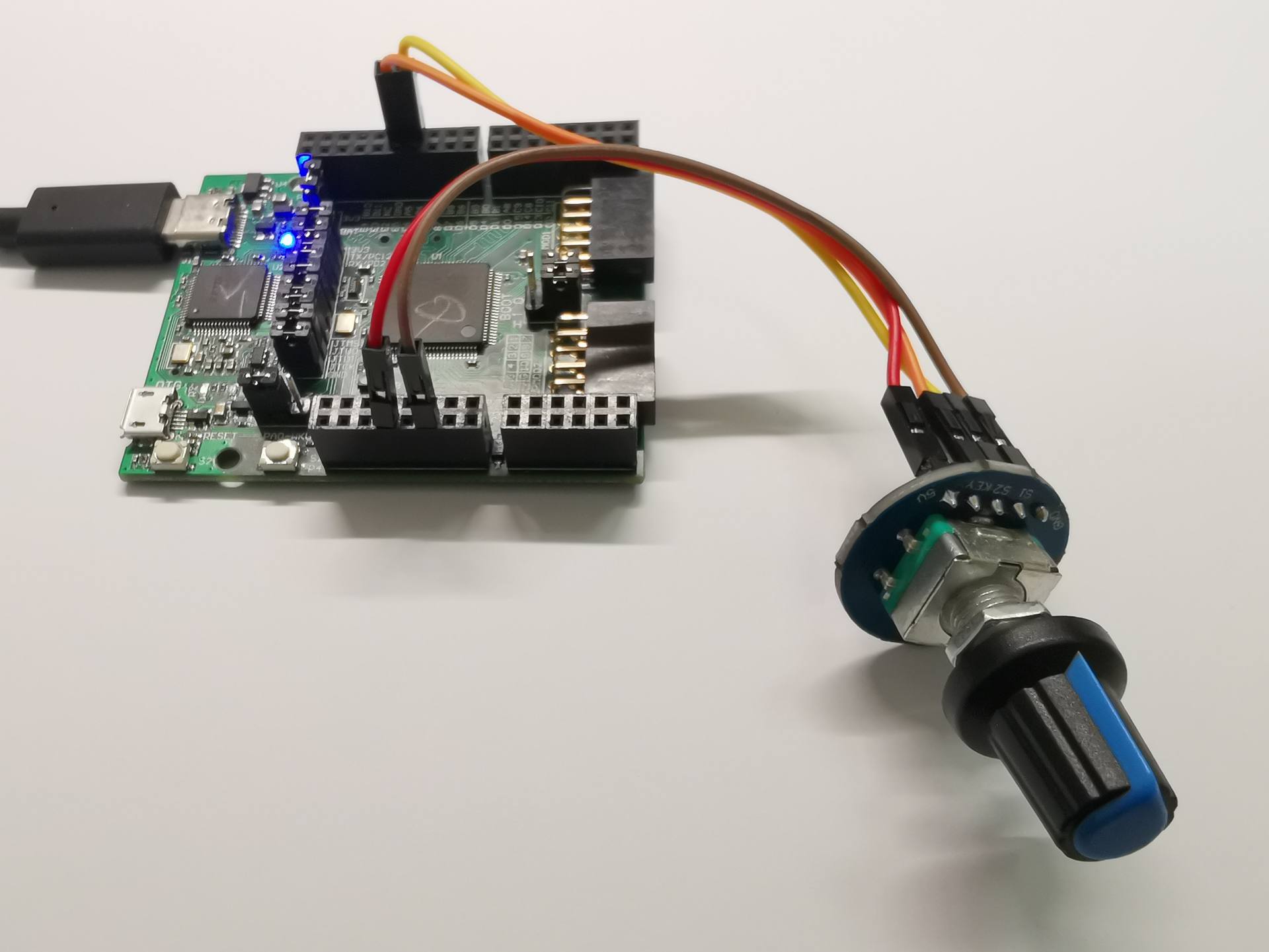
本次实验中,我们使用的是下图所示的市面上常见的旋转编码器(数字电位器):

GD32VF103的正交译码器
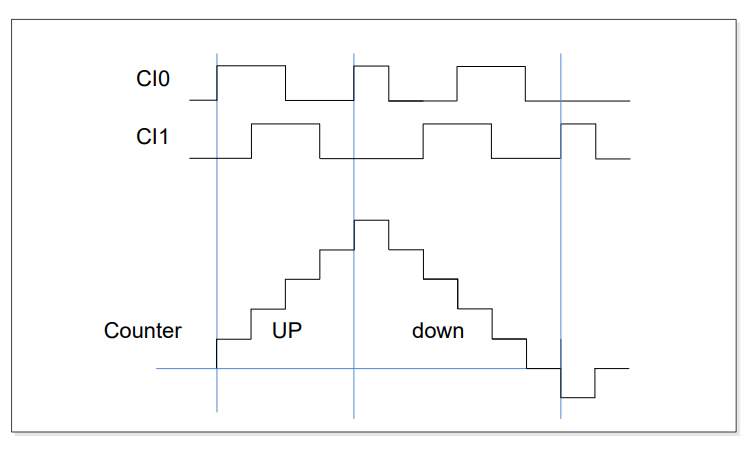
正交译码器功能使用TIMERx_CH0和TIMERx_CH1引脚生成的CI0和CI1正交信号各自相互作用产生计数值。通过设置SMC=0x01、0x02或0x03来选择是仅由CI0、仅由CI1、或者由CI0和CI1来决定定时器的计数方向。在每个方向选择源的电平改变期间,DIR位是由硬件自动改变的。计数器计数方向改变的机制如下方的图表所示。
正交译码器可以当作一个带有方向选择的外部时钟,这意味着计数器会在0和自动加载值之间连续地计数。因此,用户必须在计数器开始计数前配置TIMERx_CAR寄存器。

实验部分
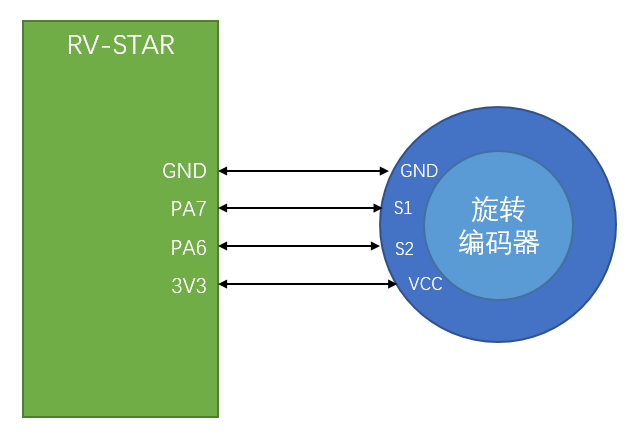
首先需要参照如下的示意图,对RV-STAR开发板和旋转编码器进行连线:
然后在集成开发环境中创建一个新工程,开始编写代码。
首先需要对定时器的编码器接口进行配置,我们使用的是TIMER2的编码器接口,对应的是PA6和PA7引脚,首先要使能它们的外设时钟和复用时钟,然后配置为浮空输入模式。
接着需要创建定时器初始化参数结构体,对定时器的功能进行配置,其中需要注意的是要将结构体参数的预分频系数设为0,周期设为10000(即定时器的自动加载值,也可以设为其他值),然后需要将定时器的模式设置为TIMER_ENCODER_MODE2(编码器模式,使用CI0和CI1计数),然后将定时器的计数值配置为5000(这样读取定时器计数的初值就是5000),最后使能TIMER2。
void encoder_init()
{
/* TIMER2_CH0 - PA6, TIMER2_CH1 - PA7 */
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_6 | GPIO_PIN_7);
rcu_periph_clock_enable(RCU_TIMER2);
timer_deinit(TIMER2);
/* initialize TIMER init parameter struct */
timer_parameter_struct timer_initpara;
timer_struct_para_init(&timer_initpara);
/* TIMER2 configuration */
timer_initpara.prescaler = 0;
timer_initpara.alignedmode = TIMER_COUNTER_EDGE;
timer_initpara.counterdirection = TIMER_COUNTER_UP;
timer_initpara.period = 10000; /* set auto-reload value */
timer_initpara.clockdivision = TIMER_CKDIV_DIV1;
timer_init(TIMER2, &timer_initpara);
/* select the encoder mode */
timer_slave_mode_select(TIMER2, TIMER_ENCODER_MODE2);
timer_counter_value_config(TIMER2, 5000); /* config the initial value */
timer_enable(TIMER2);
}
本次实验,我们通过串口的打印输出来查看编码器的计数值,因此在主程序中需要对串口进行初始化,然后在循环体中,每次读取依次定时器的计数值,再打印输出到串口。
int main()
{
encoder_init();
gd_com_init(GD32_COM0);
int counter = 0;
while (1) {
counter = timer_counter_read(TIMER2);
printf("Counter: %d\n", counter);
delay_1ms(500);
}
}
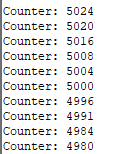
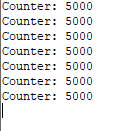
代码编写完成后,进行编译和上传,然后打开串口终端(波特率115200),可以查看到在串口终端中输出定时器的初值为5000:
然后顺时针旋转编码器的旋钮,观察到计数值增加,并且每转动一个单位计数值增加4,符合芯片数据手册中的功能描述:

逆时针旋转,计数值减少: