喜欢4次
在RISC V体系架构中,对中断有着一些定义,下面来分析一下这种定义的实现策略。
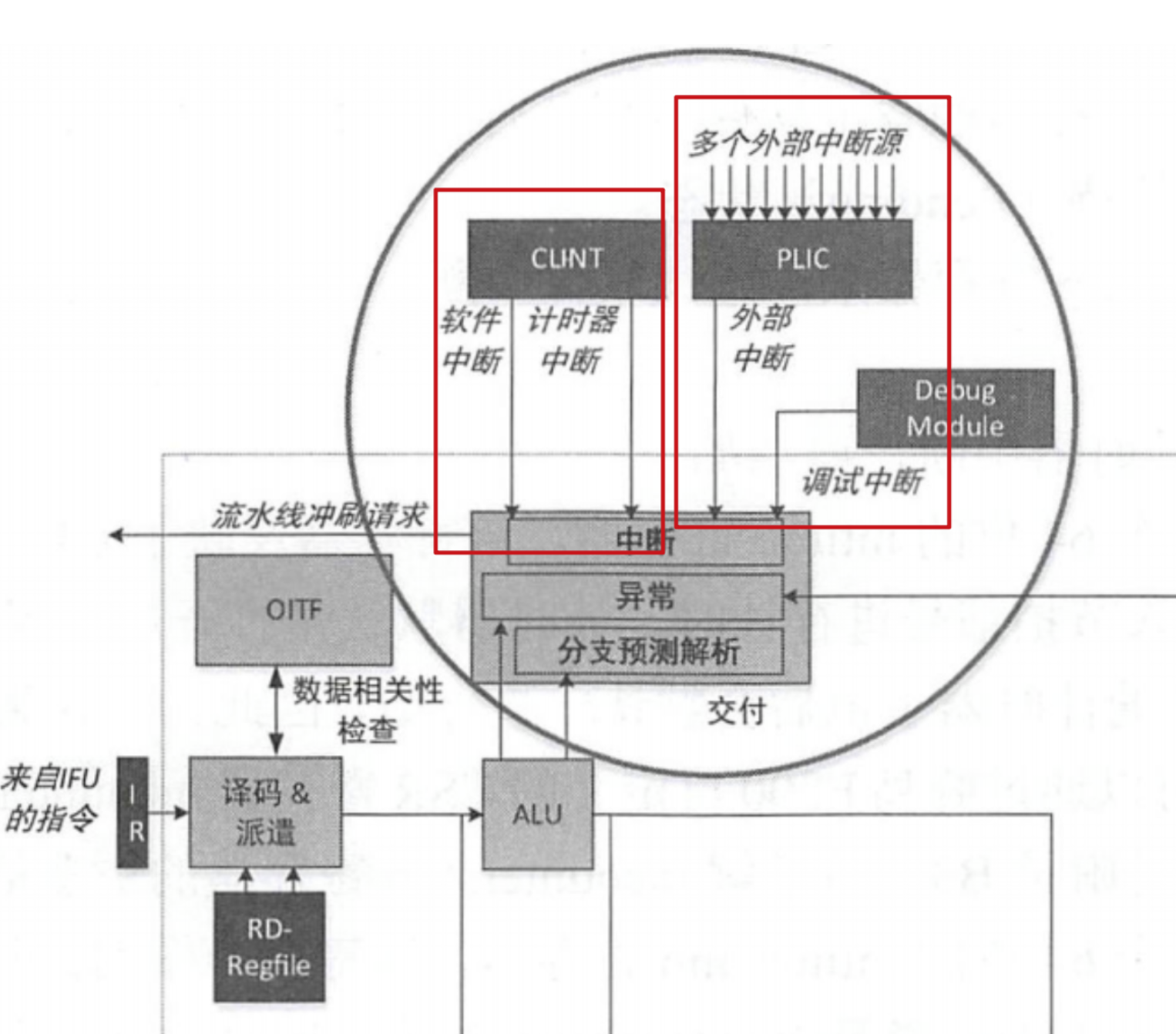
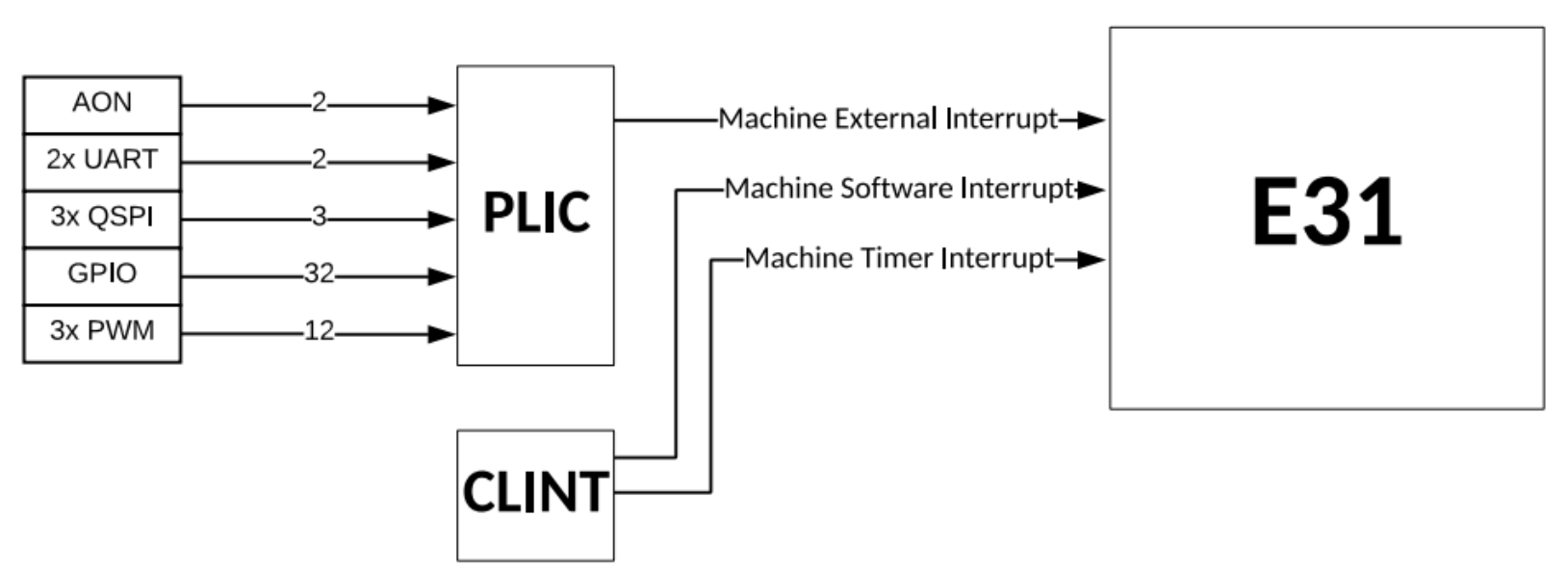
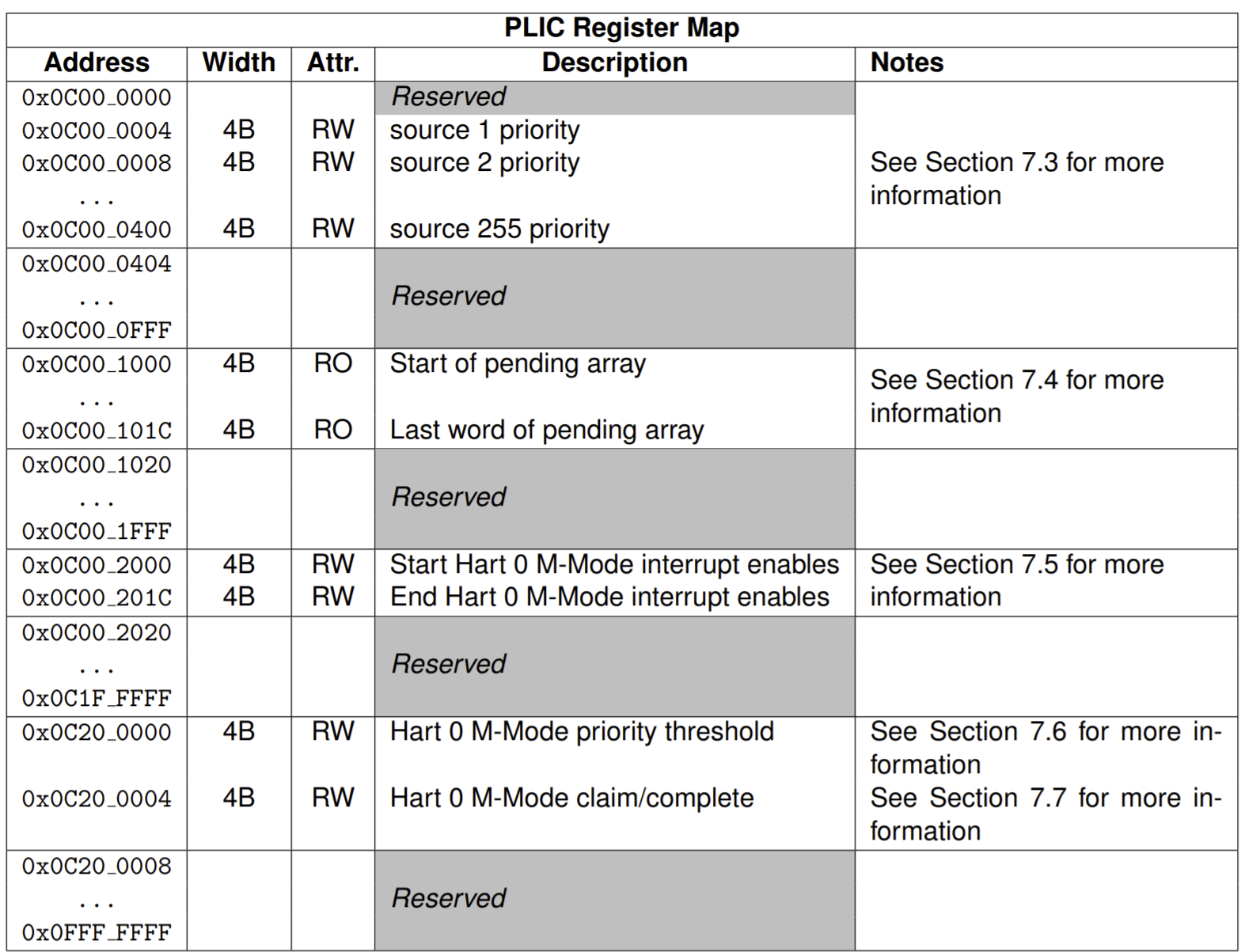
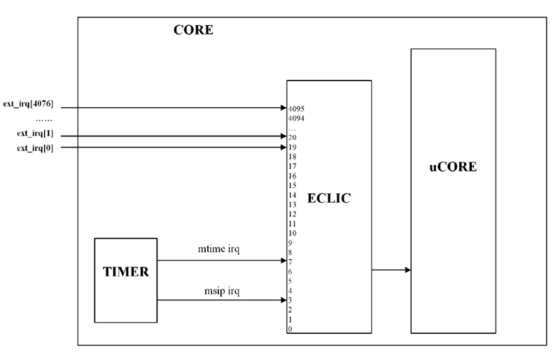
在riscv中一共定义了三种状态中断,对于hart层面,hart包含local中断源和global中断源。而local中断只有Timer和Software中断两种,而global中断则称为external interrupts。只有global中断源可以被PLIC core响应,通常为I/O device。 一般来说,timer和software是通过CLINT(CORE LOCAL INTERRUPT),而外部中断通过PLIC处理。 可以看一下蜂鸟处理器的处理流程,另外sifive的E31的中断也有如下的处理。 中断处理过程有如下的流程 接下来就是处理中断具体的函数实现 最后执行eret恢复到程序正常运行的状态。 对于CLINT来说,有Software Interrupt和Timer Interrupt,可以直接在寄存器中控制。 而PLIC实际上可以理解为arm的中断控制器,存在其map地址。 由于PLIC的使用是针对外部中断的,所以可以单独设置每个中断。可以设置如下的值: 由于PLIC的实现是独立于hart的IP设计,所以其设计和布局也不一定完全一致。 eclic的设计是芯来科技设计的一种中断处理方式。 eclic目前也是众多芯来科技core采用的中断控制器,也包括gd32vf103系列的芯片。 3号中断是内核TIMER单元生成的软件中断。 7号中断是内核TIMER单元生成的计时器中断。 而从19~4095中断号都是外部中断,其中断的编号与中断的优先级其实没有关系。 而对于ECLIC的寄存器布局,可见上图。 这个也是eclic为了减少中断延时,加速中断咬尾的自定义指令。 该指令是配合eclic处理机制设计的,其指令功能和多 由于
2.sifive中断的编程模型
3.关于eclic

4.关于jalmnxti
csrrw ra, CSR_JALMNXTI, ra一条指令可以达到JAL(Jump and Link)的效果,同时硬件上更新Link寄存器作为该指令的PC作为函数调用的返回值,因此从中断服务程序返回后,又会重新回到csrrw ra, CSR_JALMNXTI, ra指令再次执行,可以重新判断是否有中断pending,如果有则跳转到中断处理函数,从而实现中断的咬尾处理,如果没有中断等待,则jalmnxti实际上并不会做任何事情。