喜欢3次
SPI是一种同步、高速、全双工的通信总线,全称为Serial Peripheral Interface(串行外设接口),由Motorola公司提出。在嵌入式系统设计时,常使用SPI接口连接一些传感器、外接存储器或通信模组,本期内容将通过RV-STAR和Arduino UNO间的SPI通信例程,带领大家了解SPI的应用方法。
系统环境
Windows 10-64bit
软件平台
NucleiStudio IDE 202102版
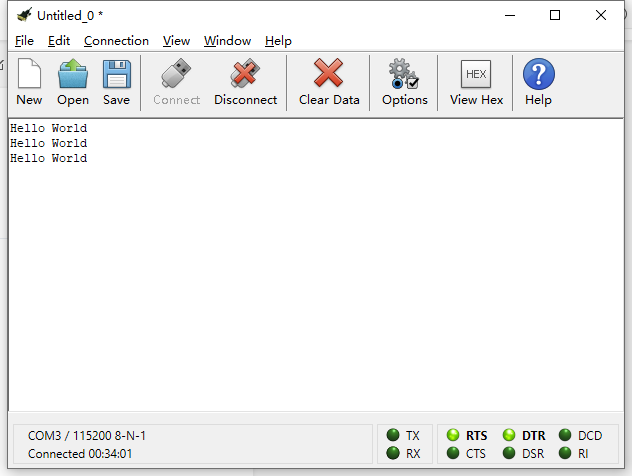
CoolTerm
硬件需求
RV-STAR开发板
Arduino UNO开发板
SPI原理简介
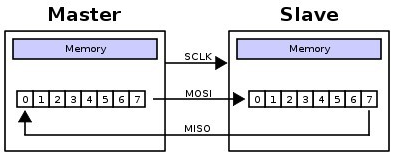
SPI是一种主从式的总线通信,通常是“一主一从”或“一主多从”,但如果能保证系统中任意时刻只有一个处于激活状态的主设备,也可以通过时分实现一条总线上有多个主设备。
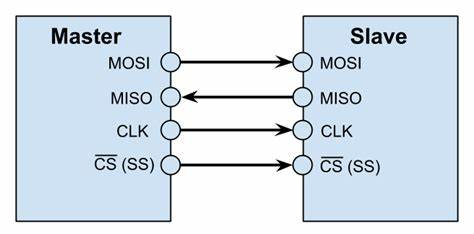
标准的SPI需要四根信号线:
SS(Slave Select):从设备选择,也称片选,主机通过拉低从机的片选信号选择从机
SCK(Serial Clock):传输时钟的信号线,时钟信号由主机产生,类似于I2C的SCL
MOSI(Master Out Slave In):主设备输出,从设备输入,由主机向从机发送数据的通道
MISO(Master In Slave Out):主设备输入,从设备输出,由从机向主机发送数据的通道

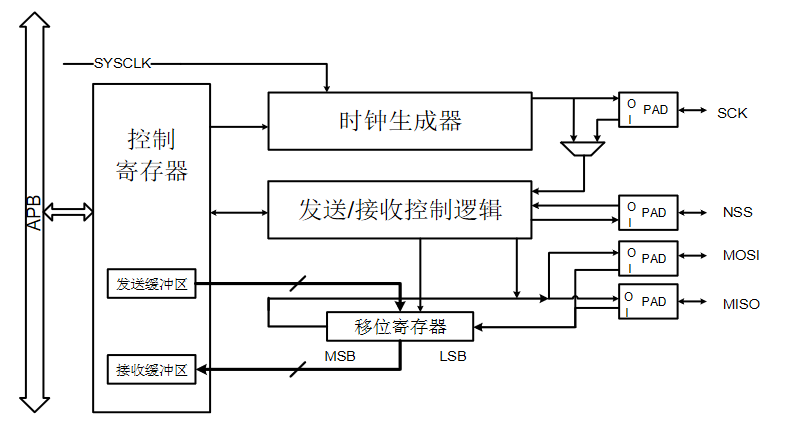
SPI模块的主要特征
实验部分
实验部分我们将实现一个简单的SPI通信过程:字符串数据由主机(RV-STAR)生成,并通过SPI接口发送到从机(Arduino UNO),然后从机再将字符串数据通过串口打印输出到PC主机上。
由于我们采用的是“一主一从”的通信模式,不需要进行片选,因此可以省去SS线的连接(但一定要共地线),这样也可以同时简化部分代码,可以参考如下方式将两个开发板进行连线:

然后需要分别创建工程并编写代码,RV-STAR的工程创建相信读者们已经很熟悉了,Arduino的话,可用Arduino IDE进行开发。
RV-STAR 作为 SPI 主机,在传输数据前需要对 SPI 外设进行配置:首先使能外设时钟,然后初始化输出端口,SCK 和 MOSI 引脚初始化为推挽输出模式,MOSI需要初始化为浮空输入模式;然后创建一个 SPI 初始化结构体并进行配置,其中,需要设置时钟极性为低、在第一个跳变沿处理数据(即 SPI_CK_PL_LOW_PH_1EDGE),这是为了和Arduino的SPI默认配置保持一致,另外由于Arduino本身的时钟速率较低,SPI速率不宜过高,因此这里分频系数设置为128,配置部分的完整代码如下:
void spi_config()
{
rcu_periph_clock_enable(RCU_GPIOA);
rcu_periph_clock_enable(RCU_AF);
rcu_periph_clock_enable(RCU_SPI0);
/* configure SPI0 GPIO : SCK/PA5, MISO/PA6, MOSI/PA7 */
gpio_init(GPIOA, GPIO_MODE_AF_PP, GPIO_OSPEED_50MHZ, GPIO_PIN_5 | GPIO_PIN_7);
gpio_init(GPIOA, GPIO_MODE_IN_FLOATING, GPIO_OSPEED_50MHZ, GPIO_PIN_6);
spi_parameter_struct spi_init_struct;
/* deinitialize SPI and the parameters */
spi_i2s_deinit(SPI0);
spi_struct_para_init(&spi_init_struct);
/* configure SPI0 parameters */
spi_init_struct.trans_mode = SPI_TRANSMODE_FULLDUPLEX;
spi_init_struct.device_mode = SPI_MASTER;
spi_init_struct.frame_size = SPI_FRAMESIZE_8BIT;
spi_init_struct.clock_polarity_phase = SPI_CK_PL_LOW_PH_1EDGE;
spi_init_struct.nss = SPI_NSS_SOFT;
spi_init_struct.prescale = SPI_PSC_128;
spi_init_struct.endian = SPI_ENDIAN_MSB;
spi_init(SPI0, &spi_init_struct);
}
配置完成后,主函数部分就比较简单了,主要是调用刚刚编写好的SPI配置函数和使能函数,然后在循环体中使用 spi_i2s_data_transmit() 发送字节流,需要注意的是需要通过 TBE 和 RBNE 两个寄存器来判断每个字节发送完成后,再发送下一个字节。
注意:当连接多个从机时,每次发送或接收数据前后,需要通过软件控制NSS拉低和拉高以选择从机,并且可以使用普通的GPIO端口作为片选引脚。
int main()
{
/* configure SPI */
spi_config();
/* SPI enable */
spi_enable(SPI0);
while (1)
{
char c;
for (const char *p = "Hello World\n\r"; c = *p; p++)
{
while(RESET == spi_i2s_flag_get(SPI0, SPI_FLAG_TBE));
spi_i2s_data_transmit(SPI0, c);
while(RESET == spi_i2s_flag_get(SPI0, SPI_FLAG_RBNE));
}
delay_1ms(2000);
}
}
Arduino作为从机,首先需要初始化SPI外设并使能中断(由于Arduino的SS引脚默认拉低,即从机传输状态,因此不需要进行额外的配置),在SPI的中断服务程序中接收主机发送的数据,在每次接收完成后(通过'\r'来判断),在主循环中通过串口打印出来,其代码如下:
/* UNO_SPI_SLAVE.cpp */
#include "Arduino.h"
#include "SPI.h"
char buff[64];
volatile byte index = 0;
volatile boolean process = false;
void setup() {
Serial.begin(115200);
pinMode(MISO, OUTPUT);
SPCR |= _BV(SPE); // turn on SPI in Slave mode
SPI.attachInterrupt();
}
void loop() {
if(process) {
process = false;
Serial.println(buff);
}
}
ISR(SPI_STC_vect) {
byte c = SPDR; // read byte form SPI Data Register
if(index < sizeof(buff)) {
buff[index++] = c;
if(c == '\r') {
index = 0;
process = true;
}
}
}
将RV-STAR和Arduino的工程代码各自编译并上传后,保持Arduino和PC的连接。